8.6 最短路径—从一个源点到其它各点的最短路径
最短路径问题是图的又一个比较典型的应用问题。例如,某一地区的一个公路网,给定了该网内的n 个城市以及这些城市之间的相通公路的距离,能否找到城市A 到城市B 之间一条举例最近的通路呢?如果将城市用点表示,城市间的公路用边表示,公路的长度作为边的权值,那么,这个问题就可归结为在网图中,求点A 到点B 的所有路径中,边的权值之和最短的那一条路径。这条路径就是两点之间的最短路径,并称路径上的第一个顶点为源点(Sourse),最后一个顶点为终点(Destination)。在非网图中,最短路径是指两点之间经历的边数最少的路径。下面讨论两种最常见的最短路径问题。
本节先来讨论单源点的最短路径问题:给定带权有向图G=(V,E)和源点v∈V,求从v 到G 中其余各顶点的最短路径。在下面的讨论中假设源点为v0。
下面就介绍解决这一问题的算法。即由迪杰斯特拉(Dijkstra)提出的一个按路径长度递增的次序产生最短路径的算法。该算法的基本思想是:设置两个顶点的集合S 和T=V-S,集合S 中存放已找到最短路径的顶点,集合T 存放当前还未找到最短路径的顶点。
初始状态时,集合S 中只包含源点v0,然后不断从集合T 中选取到顶点v0 路径长度最短的顶点u 加入到集合S 中,集合S 每加入一个新的顶点u,都要修改顶点v0 到集合T 中剩余顶点的最短路径长度值,集合T 中各顶点新的最短路径长度值为原来的最短路径长度值与顶点u 的最短路径长度值加上u 到该顶点的路径长度值中的较小值。此过程不断重复,直到集合T 的顶点全部加入到S 中为止。
Dijkstra 算法的正确性可以用反证法加以证明。假设下一条最短路径的终点为x,那么,该路径必然或者是弧(v0,x),或者是中间只经过集合S 中的顶点而到达顶点x 的路径。
因为假若此路径上除x 之外有一个或一个以上的顶点不在集合S 中,那么必然存在另外的终点不在S 中而路径长度比此路径还短的路径,这与我们按路径长度递增的顺序产生最短路径的前提相矛盾,所以此假设不成立。
下面介绍Dijkstra 算法的实现。
首先,引进一个辅助向量D,它的每个分量D[i] 表示当前所找到的从始点v 到每个终点vi 的最短路径的长度。它的初态为:若从v 到vi 有弧,则D[i]为弧上的权值;否则置D[i]为∞。显然,长度为:
那么,下一条长度次短的最短是哪一条呢?假设该次短路径的终点是vk ,则可想而知,这条路径或者是(v, vk),或者是(v, vj, vk)。它的长度或者是从v 到vk 的弧上的权值,或者是D[j]和从vj 到vk 的弧上的权值之和。
依据前面介绍的算法思想,在一般情况下,下一条长度次短的最短路径的长度必是:
根据以上分析,可以得到如下描述的算法:
(1)假设用带权的邻接矩阵edges 来表示带权有向图,edges[i][j] 表示弧〈vi, vj〉上的权值。若〈vi, vj〉不存在,则置edges[i][j]为∞(在计算机上可用允许的最大值代替)。S 为已找到从v 出发的最短路径的终点的集合,它的初始状态为空集。那么,从v 出发到图上其余各顶点(终点)vi 可能达到最短路径长度的初值为:
算法8.17 为用C 语言描述的Dijkstra 算法。
void ShortestPath_1(Mgraph G,int v0,PathMatrix *p, ShortPathTable *D)
{ /*用Dijkstra 算法求有向网G 的v0 顶点到其余顶点v 的最短路径P[v]及其路径长度D[v]*/
/*若P[v][w]为TRUE,则w 是从v0 到v 当前求得最短路径上的顶点*/
/*final[v] 为TRUE 当且仅当v∈S, ,即已经求得从v0 到v 的最短路径*/
/*常量INFINITY 为边上权值可能的最大值*/
for (v=0;v<G.vexnum;++v)
{fianl[v]=FALSE; D[v]=G.edges[v0][v];
for (w=0; w<G.vexnum; ++w) P[v][w]=FALSE; /*设空路径*/
if (D[v]<INFINITY) {P[v][v0]=TRUE; P[v][w]=TRUE;}
}
D[v0]=0; final[v0]=TRUE; /*初始化,v0 顶点属于S 集*/
/*开始主循环,每次求得v0 到某个v 顶点的最短路径,并加v 到集*/
for(i=1; i<G.vexnum; ++i) /*其余G.vexnum-1 个顶点*/
{min=INFINITY; /*min 为当前所知离v0 顶点的最近距离*/
for (w=0;w<G.vexnum;++w)
if (!final[w]) /*w 顶点在V-S 中*/
if (D[w]<min) {v=w; min=D[w];}
final[v]=TRUE /*离v0 顶点最近的v 加入S 集合*/
for(w=0;w>G.vexnum;++w) /*更新当前最短路径*/
if (!final[w]&&(min+G.edges[v][w]<D[w])) /*修改D[w]和P[w],w∈V-S*/
{ D[w]=min+G.edges[v][w];
P[w]=P[v]; P[w][v]=TRUE; /*P[w]=P[v]+P[w]*/
}
}
}/*ShortestPath._1*/
算法8.17
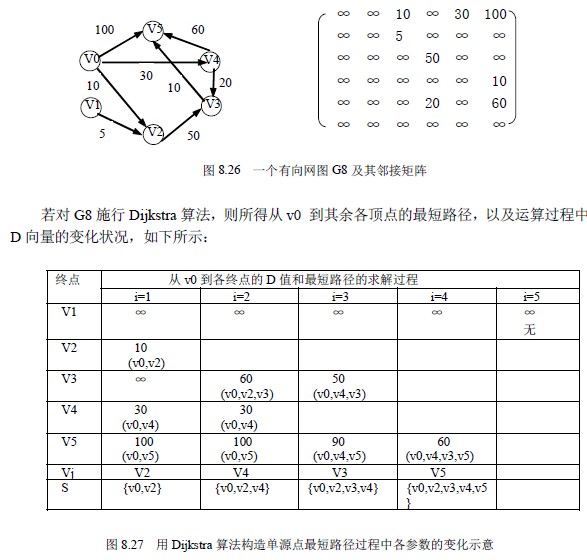
例如,图8.26 所示一个有向网图G8 的带权邻接矩阵为:
下面分析一下这个算法的运行时间。第一个for 循环的时间复杂度是O(n),第二个for循环共进行n-1 次,每次执行的时间是O(n)。所以总是的时间复杂度是O(n2)。如果用带权的邻接表作为有向图的存储结构,则虽然修改D 的时间可以减少,但由于在D 向量中选择最小的分量的时间不变,所以总的时间仍为O(n2)。
如果只希望找到从源点到某一个特定的终点的最短路径,但是,从上面我们求最短路径的原理来看,这个问题和求源点到其它所有顶点的最短路径一样复杂,其时间复杂度也是O(n2)。
本节先来讨论单源点的最短路径问题:给定带权有向图G=(V,E)和源点v∈V,求从v 到G 中其余各顶点的最短路径。在下面的讨论中假设源点为v0。
下面就介绍解决这一问题的算法。即由迪杰斯特拉(Dijkstra)提出的一个按路径长度递增的次序产生最短路径的算法。该算法的基本思想是:设置两个顶点的集合S 和T=V-S,集合S 中存放已找到最短路径的顶点,集合T 存放当前还未找到最短路径的顶点。
初始状态时,集合S 中只包含源点v0,然后不断从集合T 中选取到顶点v0 路径长度最短的顶点u 加入到集合S 中,集合S 每加入一个新的顶点u,都要修改顶点v0 到集合T 中剩余顶点的最短路径长度值,集合T 中各顶点新的最短路径长度值为原来的最短路径长度值与顶点u 的最短路径长度值加上u 到该顶点的路径长度值中的较小值。此过程不断重复,直到集合T 的顶点全部加入到S 中为止。
Dijkstra 算法的正确性可以用反证法加以证明。假设下一条最短路径的终点为x,那么,该路径必然或者是弧(v0,x),或者是中间只经过集合S 中的顶点而到达顶点x 的路径。
因为假若此路径上除x 之外有一个或一个以上的顶点不在集合S 中,那么必然存在另外的终点不在S 中而路径长度比此路径还短的路径,这与我们按路径长度递增的顺序产生最短路径的前提相矛盾,所以此假设不成立。
下面介绍Dijkstra 算法的实现。
首先,引进一个辅助向量D,它的每个分量D[i] 表示当前所找到的从始点v 到每个终点vi 的最短路径的长度。它的初态为:若从v 到vi 有弧,则D[i]为弧上的权值;否则置D[i]为∞。显然,长度为:
D[j]=Min{D[i]| vi∈V}
的路径就是从v 出发的长度最短的一条最短路径。此路径为(v ,vj)。那么,下一条长度次短的最短是哪一条呢?假设该次短路径的终点是vk ,则可想而知,这条路径或者是(v, vk),或者是(v, vj, vk)。它的长度或者是从v 到vk 的弧上的权值,或者是D[j]和从vj 到vk 的弧上的权值之和。
依据前面介绍的算法思想,在一般情况下,下一条长度次短的最短路径的长度必是:
D[j]=Min{D[i]| vi∈V-S}
其中,D[i] 或者弧(v, vi)上的权值,或者是D[k]( vk∈S 和弧(vk, vi)上的权值之和。根据以上分析,可以得到如下描述的算法:
(1)假设用带权的邻接矩阵edges 来表示带权有向图,edges[i][j] 表示弧〈vi, vj〉上的权值。若〈vi, vj〉不存在,则置edges[i][j]为∞(在计算机上可用允许的最大值代替)。S 为已找到从v 出发的最短路径的终点的集合,它的初始状态为空集。那么,从v 出发到图上其余各顶点(终点)vi 可能达到最短路径长度的初值为:
D[i]= edges[Locate Vex(G,v)][i] vi∈V
(2)选择vj,使得
D[j]=Min{D[i]| vi∈V-S}
vj 就是当前求得的一条从v 出发的最短路径的终点。令
S=S∪{j}
(3)修改从v 出发到集合V-S 上任一顶点vk 可达的最短路径长度。如果
D[j]+ edges[j][k]<D[k]
则修改D[k]为
D[k]=D[j]+ edges[j][k]
重复操作(2)、(3)共n-1 次。由此求得从v 到图上其余各顶点的最短路径是依路径长度递增的序列。算法8.17 为用C 语言描述的Dijkstra 算法。
void ShortestPath_1(Mgraph G,int v0,PathMatrix *p, ShortPathTable *D)
{ /*用Dijkstra 算法求有向网G 的v0 顶点到其余顶点v 的最短路径P[v]及其路径长度D[v]*/
/*若P[v][w]为TRUE,则w 是从v0 到v 当前求得最短路径上的顶点*/
/*final[v] 为TRUE 当且仅当v∈S, ,即已经求得从v0 到v 的最短路径*/
/*常量INFINITY 为边上权值可能的最大值*/
for (v=0;v<G.vexnum;++v)
{fianl[v]=FALSE; D[v]=G.edges[v0][v];
for (w=0; w<G.vexnum; ++w) P[v][w]=FALSE; /*设空路径*/
if (D[v]<INFINITY) {P[v][v0]=TRUE; P[v][w]=TRUE;}
}
D[v0]=0; final[v0]=TRUE; /*初始化,v0 顶点属于S 集*/
/*开始主循环,每次求得v0 到某个v 顶点的最短路径,并加v 到集*/
for(i=1; i<G.vexnum; ++i) /*其余G.vexnum-1 个顶点*/
{min=INFINITY; /*min 为当前所知离v0 顶点的最近距离*/
for (w=0;w<G.vexnum;++w)
if (!final[w]) /*w 顶点在V-S 中*/
if (D[w]<min) {v=w; min=D[w];}
final[v]=TRUE /*离v0 顶点最近的v 加入S 集合*/
for(w=0;w>G.vexnum;++w) /*更新当前最短路径*/
if (!final[w]&&(min+G.edges[v][w]<D[w])) /*修改D[w]和P[w],w∈V-S*/
{ D[w]=min+G.edges[v][w];
P[w]=P[v]; P[w][v]=TRUE; /*P[w]=P[v]+P[w]*/
}
}
}/*ShortestPath._1*/
算法8.17
例如,图8.26 所示一个有向网图G8 的带权邻接矩阵为:
下面分析一下这个算法的运行时间。第一个for 循环的时间复杂度是O(n),第二个for循环共进行n-1 次,每次执行的时间是O(n)。所以总是的时间复杂度是O(n2)。如果用带权的邻接表作为有向图的存储结构,则虽然修改D 的时间可以减少,但由于在D 向量中选择最小的分量的时间不变,所以总的时间仍为O(n2)。
如果只希望找到从源点到某一个特定的终点的最短路径,但是,从上面我们求最短路径的原理来看,这个问题和求源点到其它所有顶点的最短路径一样复杂,其时间复杂度也是O(n2)。