10.2插入排序—希尔排序(Shell’s Sort)
希尔排序又称缩小增量排序,是1959 年由D.L.Shell 提出来的,较前述几种插入排序方法有较大的改进。
直接插入排序算法简单,在n 值较小时,效率比较高,在n 值很大时,若序列按关键码基本有序,效率依然较高,其时间效率可提高到O(n)。希尔排序即是从这两点出发,给出插入排序的改进方法。
希尔排序方法:
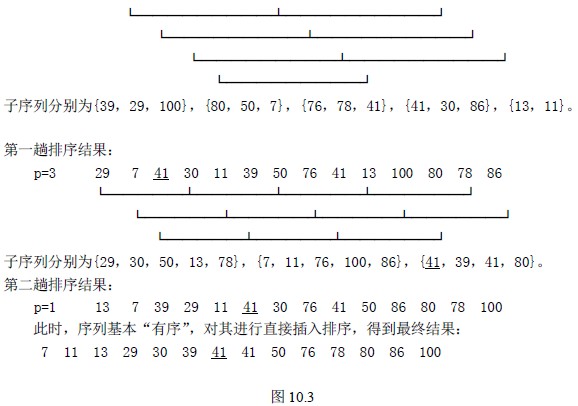
【例10.4】待排序列为39,80,76,41,13,29,50,78,30,11,100,7,41,86。
步长因子分别取5、3、1,则排序过程如下:

【算法10.5】
void ShellInsert(S_TBL &p,int dk)
{ /*一趟增量为dk 的插入排序,dk 为步长因子*/
for(i=dk+1;i<=p->length;i++)
if(p->elem[i].key < p->elem[i-dk].key) /*小于时,需elem[i]将插入有序表*/
{ p->elem[0]=p->elem[i]; /*为统一算法设置监测*/
for(j=i-dk;j>0&&p->elem[0].key < p->elem[j].key;j=j-dk)
p->elem[j+dk]=p->elem[j]; /*记录后移*/
p->elem[j+dk]=p->elem[0]; /*插入到正确位置*/
}
}
void ShellSort(S_TBL *p,int dlta[],int t)
{ /*按增量序列dlta[0,1…,t-1]对顺序表*p 作希尔排序*/
for(k=0;k<t;t++)
ShellSort(p,dlta[k]); /*一趟增量为dlta[k]的插入排序*/
}
【时效分析】
希尔排序时效分析很难,关键码的比较次数与记录移动次数依赖于步长因子序列的选取,特定情况下可以准确估算出关键码的比较次数和记录的移动次数。目前还没有人给出选取最好的步长因子序列的方法。步长因子序列可以有各种取法,有取奇数的,也有取质数的,但需要注意:步长因子中除1 外没有公因子,且最后一个步长因子必须为1。希尔排序方法是一个不稳定的排序方法。
直接插入排序算法简单,在n 值较小时,效率比较高,在n 值很大时,若序列按关键码基本有序,效率依然较高,其时间效率可提高到O(n)。希尔排序即是从这两点出发,给出插入排序的改进方法。
希尔排序方法:
- 选择一个步长序列t1,t2,…,tk,其中ti>tj,tk=1;
- 按步长序列个数k,对序列进行k 趟排序;
- 每趟排序,根据对应的步长ti,将待排序列分割成若干长度为m 的子序列,分别对各子表进行直接插入排序。仅步长因子为1 时,整个序列作为一个表来处理,表长度即为整个序列的长度。
【例10.4】待排序列为39,80,76,41,13,29,50,78,30,11,100,7,41,86。
步长因子分别取5、3、1,则排序过程如下:
【算法10.5】
void ShellInsert(S_TBL &p,int dk)
{ /*一趟增量为dk 的插入排序,dk 为步长因子*/
for(i=dk+1;i<=p->length;i++)
if(p->elem[i].key < p->elem[i-dk].key) /*小于时,需elem[i]将插入有序表*/
{ p->elem[0]=p->elem[i]; /*为统一算法设置监测*/
for(j=i-dk;j>0&&p->elem[0].key < p->elem[j].key;j=j-dk)
p->elem[j+dk]=p->elem[j]; /*记录后移*/
p->elem[j+dk]=p->elem[0]; /*插入到正确位置*/
}
}
void ShellSort(S_TBL *p,int dlta[],int t)
{ /*按增量序列dlta[0,1…,t-1]对顺序表*p 作希尔排序*/
for(k=0;k<t;t++)
ShellSort(p,dlta[k]); /*一趟增量为dlta[k]的插入排序*/
}
【时效分析】
希尔排序时效分析很难,关键码的比较次数与记录移动次数依赖于步长因子序列的选取,特定情况下可以准确估算出关键码的比较次数和记录的移动次数。目前还没有人给出选取最好的步长因子序列的方法。步长因子序列可以有各种取法,有取奇数的,也有取质数的,但需要注意:步长因子中除1 外没有公因子,且最后一个步长因子必须为1。希尔排序方法是一个不稳定的排序方法。